
Image Features and Matching
Contents
Image Features and Matching#
Finding fundamental matrix is kind of a chicken-and-egg problem. To map the coordinates between left and right cameras, we require the fundamental matrix, but to find the fundamental matrix, we want at least 8 corresponding image coordinates between left and right image planes.
We use image features to solve this correspondence problem. Applications of these image-features based mapping can be found in Panorama creation.
Local features in the image are used to find these corresponding points of objects.
Advantages of local features.
Locality - robust to occlusion and clutter.
Distinctiveness - can differentiate a large database of objects.
Quantify - hundreds or thousands in a single image.
Efficiency - real-time performance achievable.
Generality - exploit different types of features in different situations.
Challenges
Repeatability
Uniqueness
Invariance
Local features are usually a patch of \(n \times n\) dimensions.
Note
This leads us to a question. “Which are the best local features to solve the correspondence problem?”
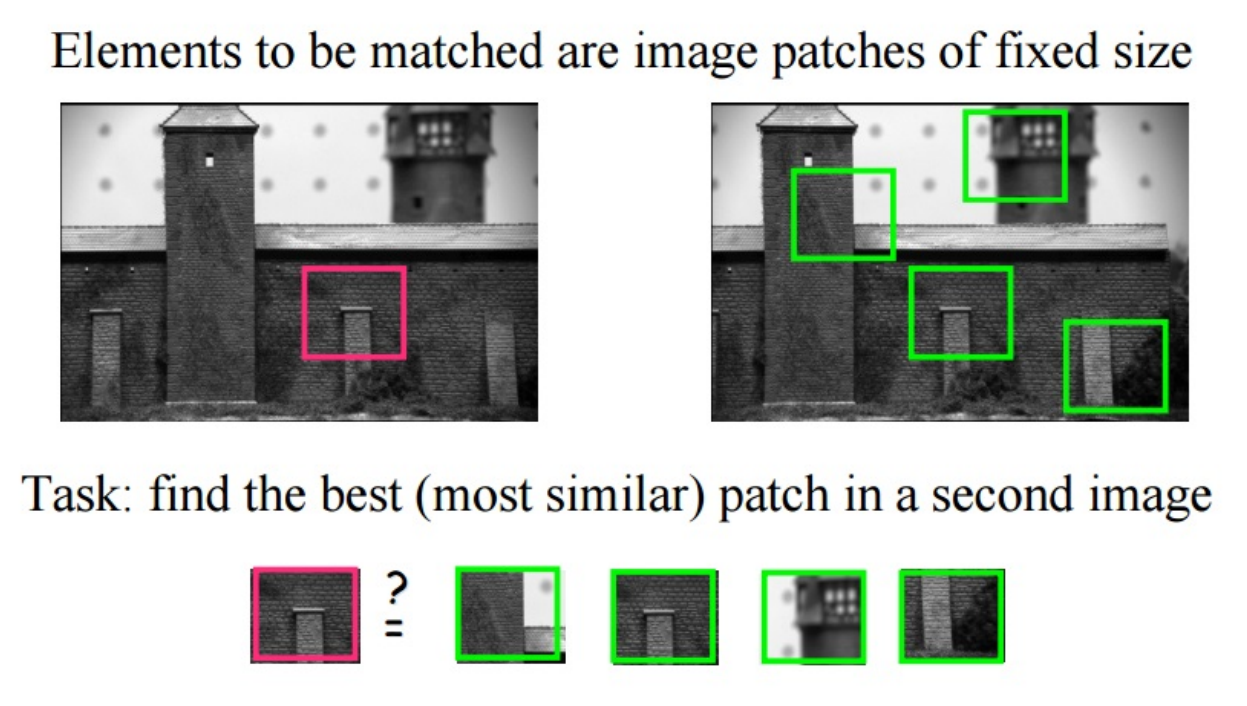
Fig. 26 Feature selection for correspondence#
Intuitively, corners are the good features, because corners are easier to identify (solving the uniqueness challenge) with low ambiguity.
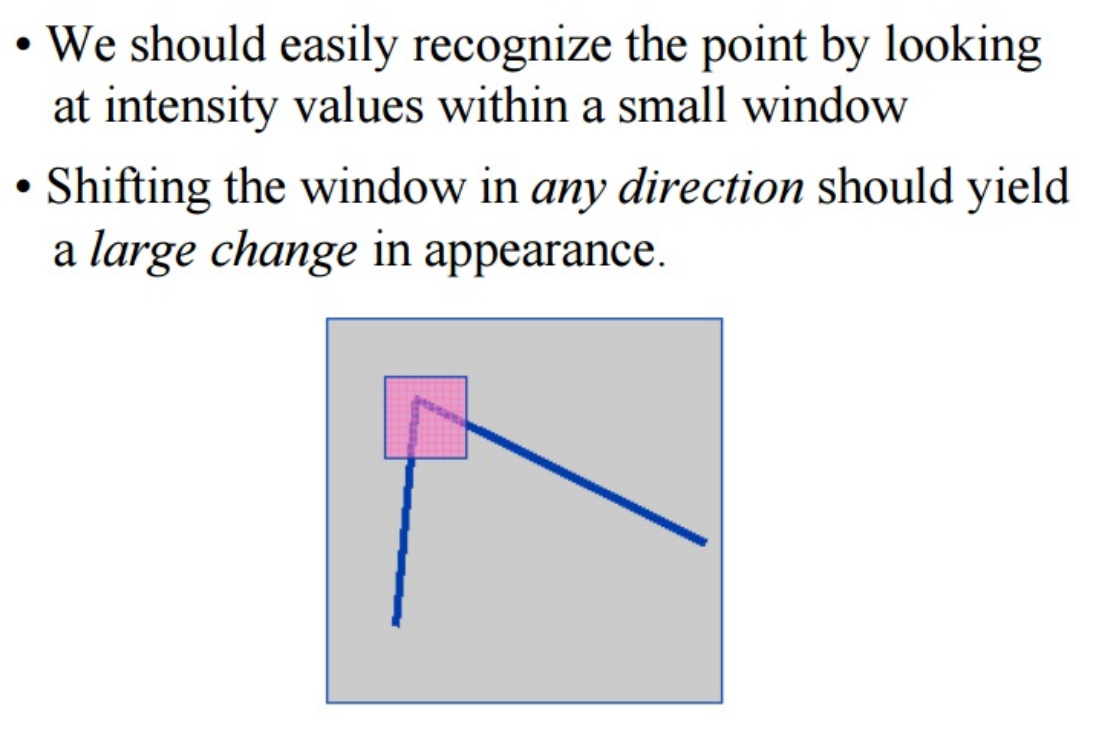
Fig. 27 Corners as features#
Harris corner detector gives a mathematical approach for determining the performance of an image patch w.r.t. movement of the patch along x and y axes.
The math behind Harris corner detector#
Each value at every pixel represents its intensity from \(0 \rightarrow 255\). When the image patch is translated across \(x\) and \(y\) axis, the measure of intensity at each pixel changes. If this change is drastic, then the location could be a corner. This would be a good candidate for correspondence matching.
The difference in the intensity between pixel locations of two patches is simply a square of difference of the intensity values at every pixel for first and second patch.
If \(\Delta I\) is low, it shows that the feature is bad. The change in Intensity \(\Delta I\) depends on the movement along \(x\) and \(y\) axes. This movement along an axis helps us determine the geometry of the patch.
To acheive the above patch movement along \(x\) and \(y\) axes, we generalize eq{delta-I} as:
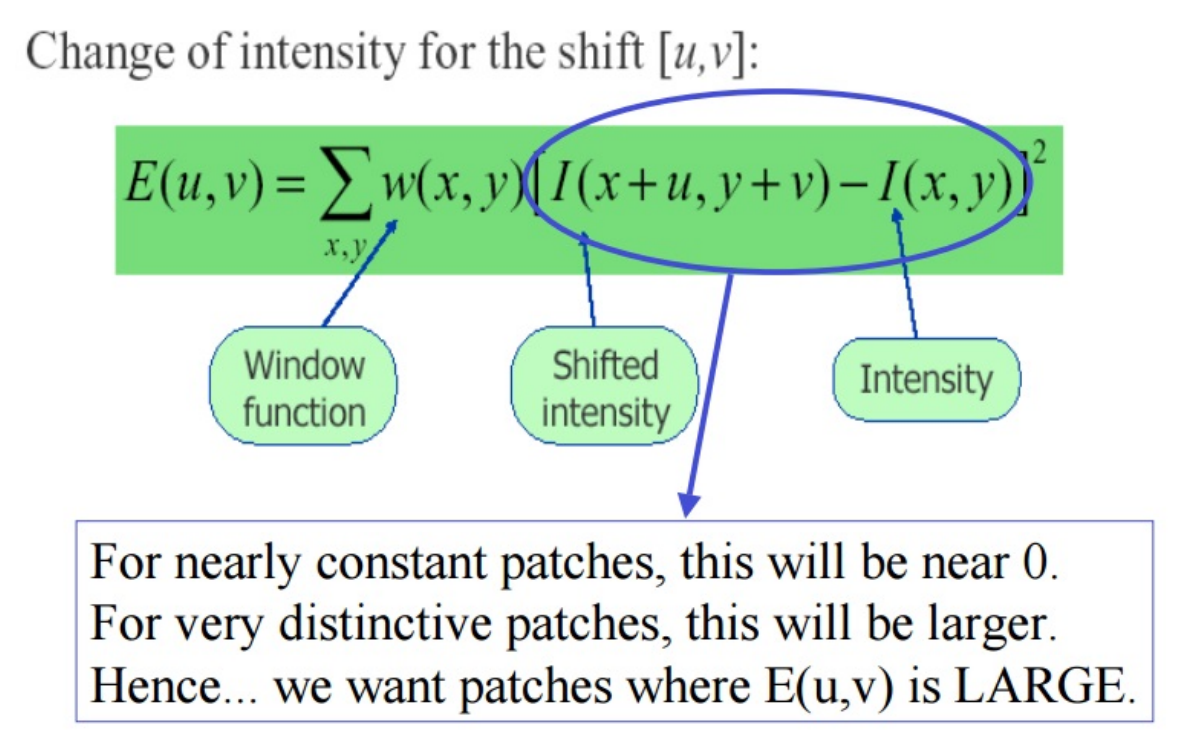
Fig. 28 Change in the intensity of pixels with movement of image patch.#
Using the taylor series expansion, we represent:
The matrix form of \(E(u,v)\) can be written as:
\(I_x\) and \(I_y\) are the gradients of Intensity function along \(x\) and \(y\) axes.
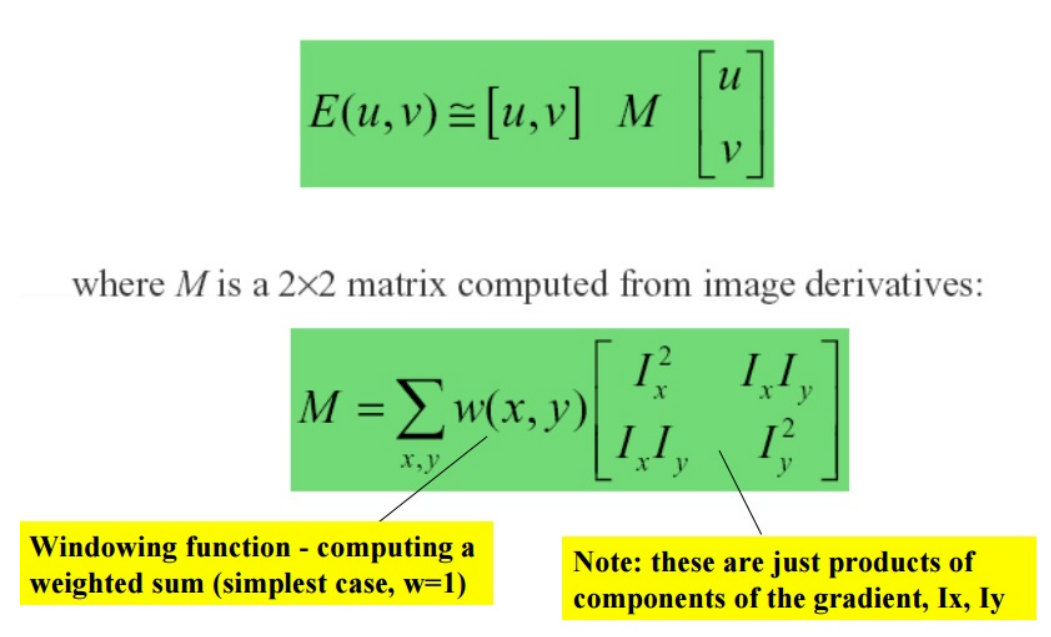
Fig. 29 Harris corner detector equation.#
\(w(x,y)\) demonstrates the importance of difference in intensity of pixels at a location. Sometimes, the pixels at the center can be more important than edge pixels.
A good features has \(E(u,v)\) as a very high value.
\(I_x\) and \(I_y\) elaborated
\(I_x\) and \(I_y\) are the partial derivatives of the function \(I\) w.r.t. \(x\) and \(y\) respectively.
Along the vertical edge \(I_y = 0\), \(I_x = \text{large}\)
Along the horizontal edge \(I_x = 0\), \(I_y = \text{large}\).
At a corner \(I_x = \text{large}, I_y = \text{large}\).
Using geometry and the concept of eigen values, the matrix \(M\) is represented in the form of eigen values, \(\lambda _1\) and \(\lambda _2\)
Eigen values represent the maximum change in \(x\) and \(y\) direction of \(I\).
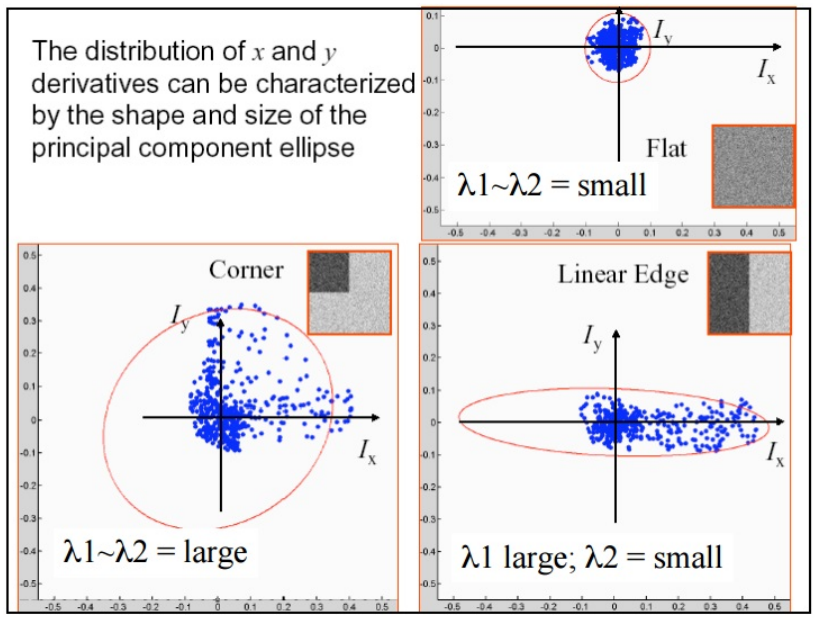
Fig. 30 Eigen value representation of gradients \(I_x\) and \(I_y\)#
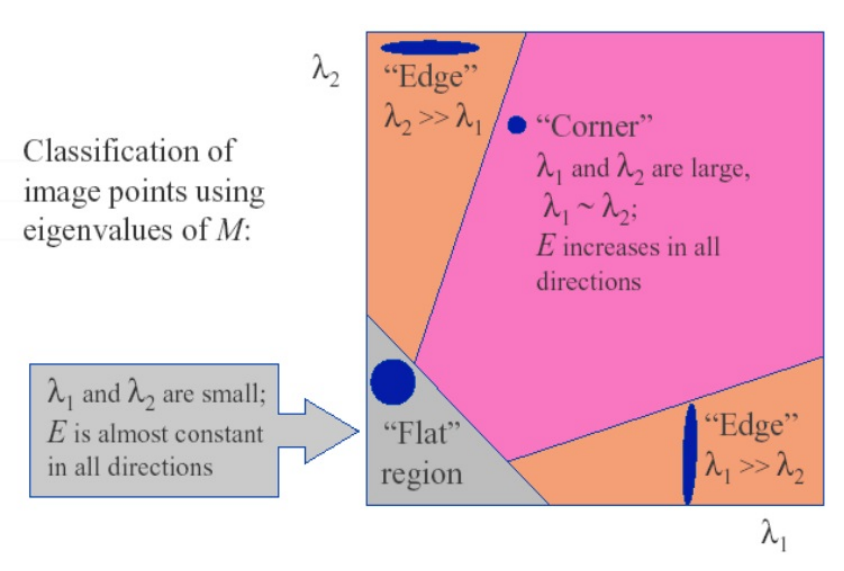
Fig. 31 Classification of image patches using eigen values.#
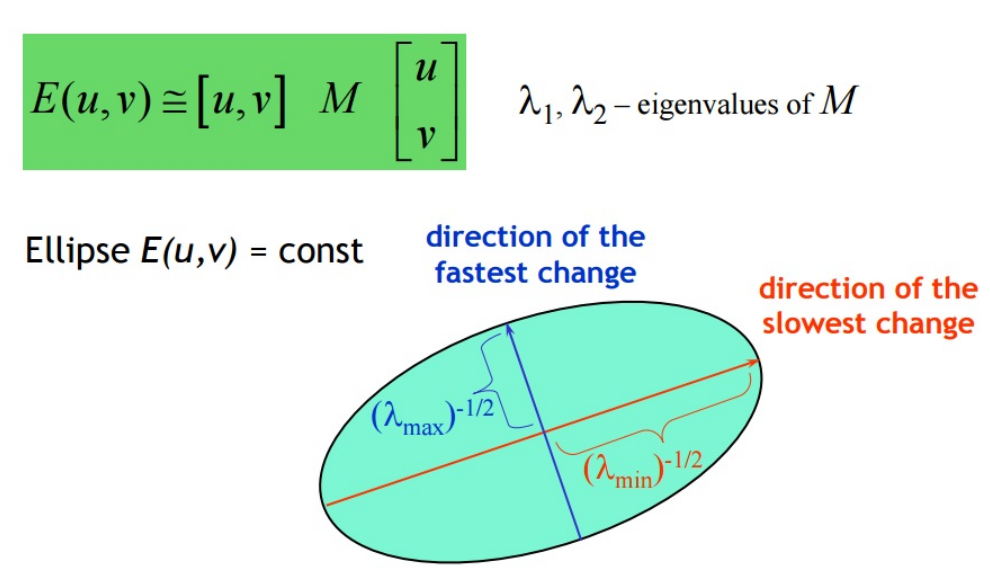
Fig. 32 Eigen value representation of \(M\)#
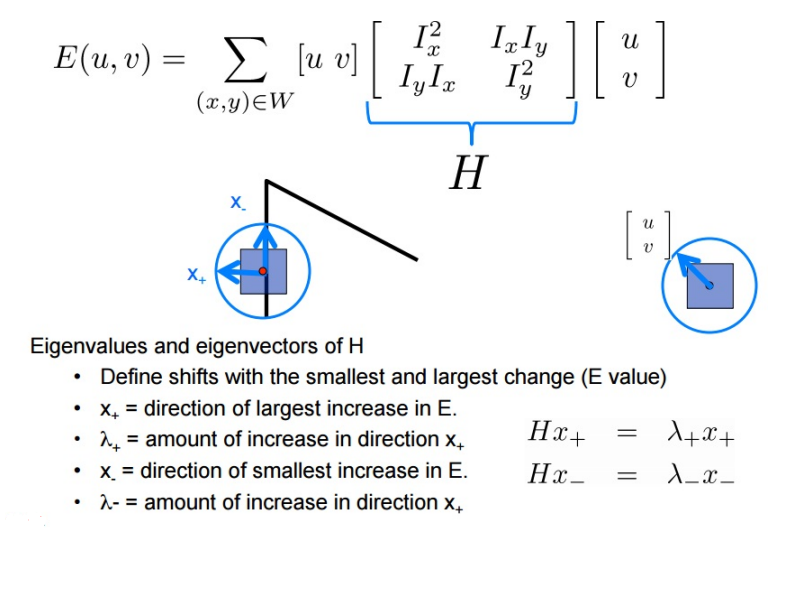
Fig. 33 The Matrix \(H\).#
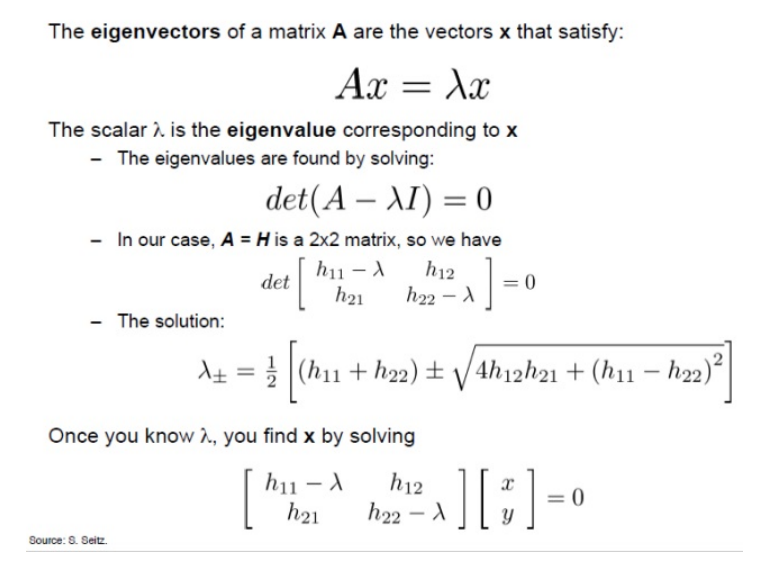
Fig. 34 Eigen values of \(H\)#
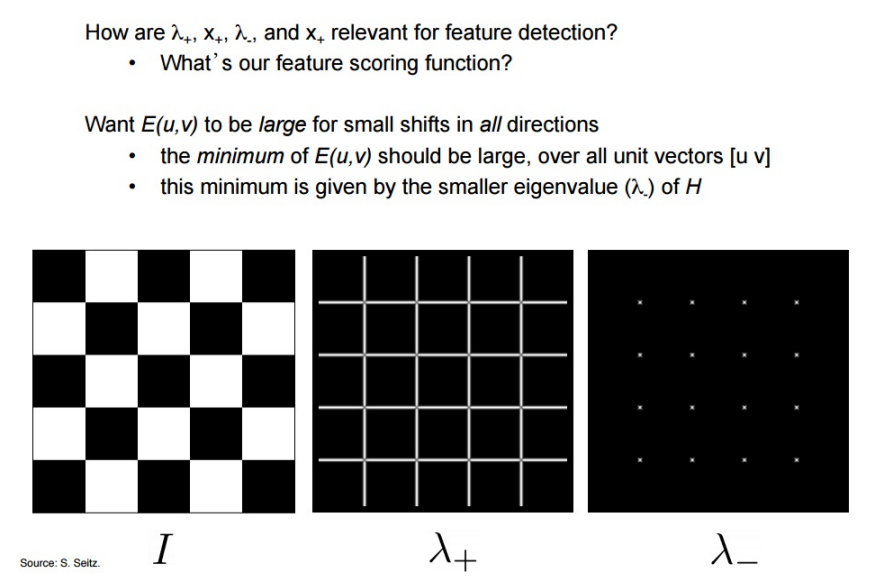
Fig. 35 Detection on a chess board#
Note
At every pixel we calculate the matrix \(M\).
\(\lambda_+\) is the amount of increase in the direction of largest increase. It is responsible for the detection of corners as well as the edges.
\(\lambda_-\) is the amount of increase in the direction of smallest increase. It is responsible for the detection of corners in the image.
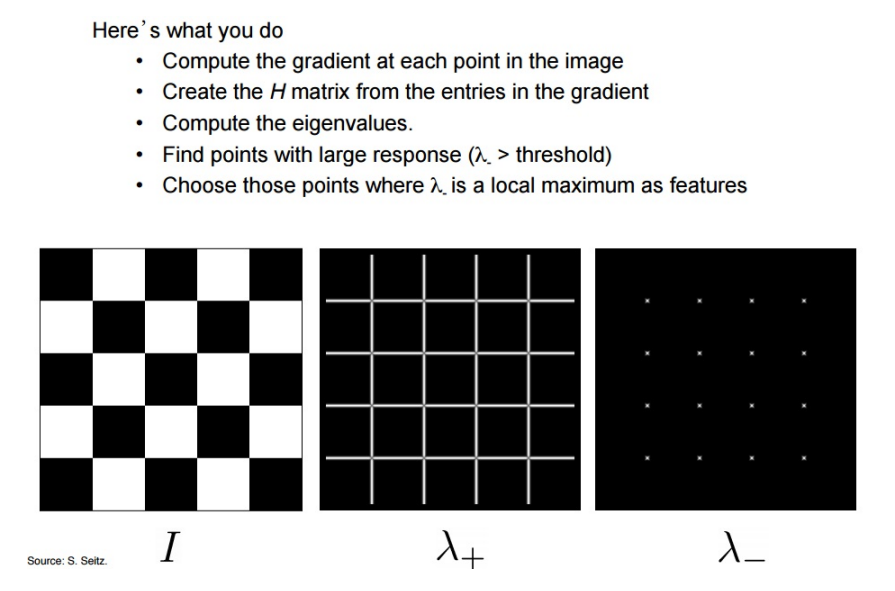
Fig. 36 Detection on a chess board#
The Harris Operator#
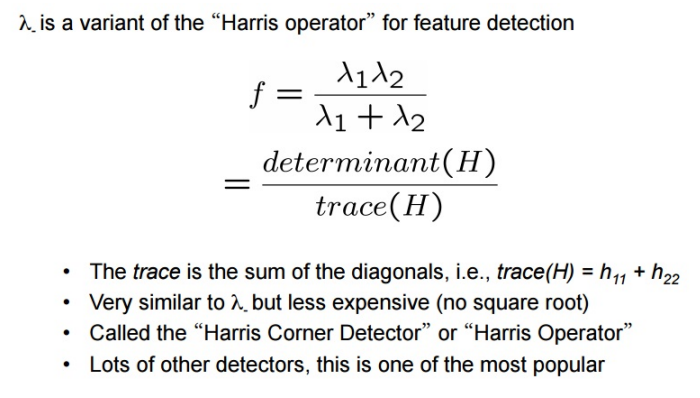
Fig. 37 Harris Operator for the matrix \(H\) in Fig-33#
The Harris Operator \(f\) is smoother than \(\lambda_-\). \(\lambda_-\) is more picky.
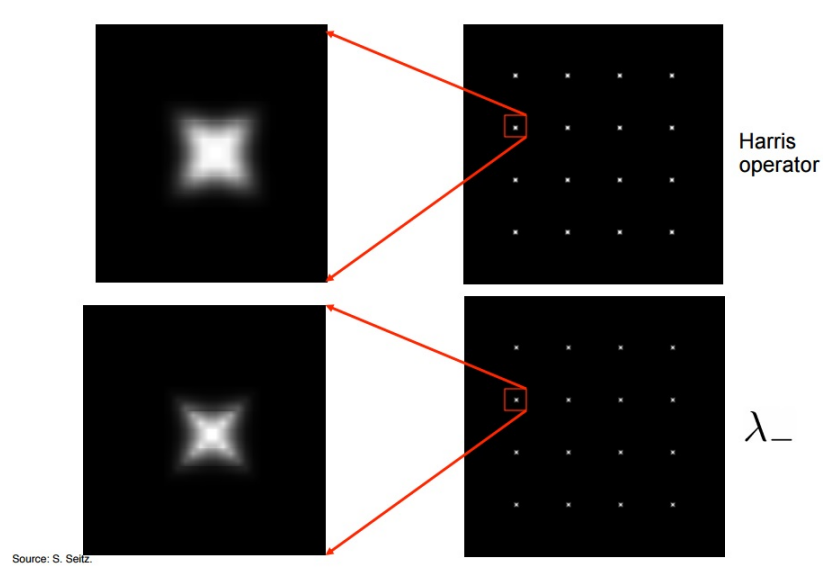
Fig. 38 Harris Operator v/s \(\lambda_-\)#
Input |
Detection |
Output |
|---|---|---|
|
|
|

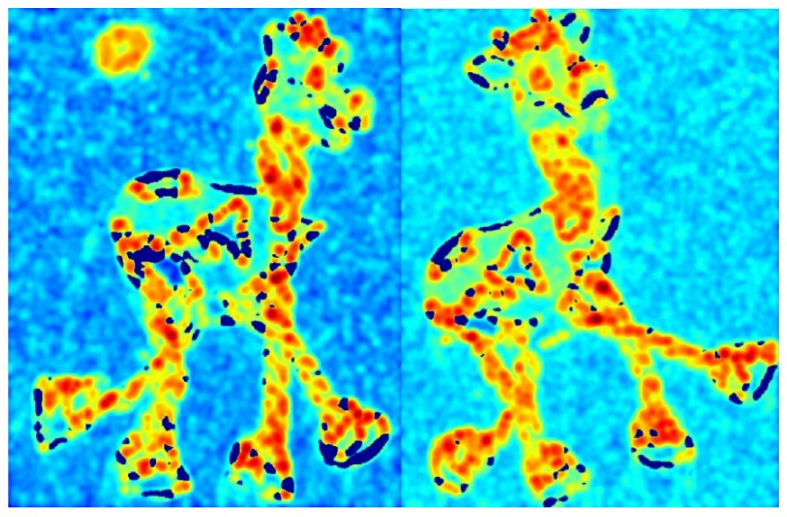
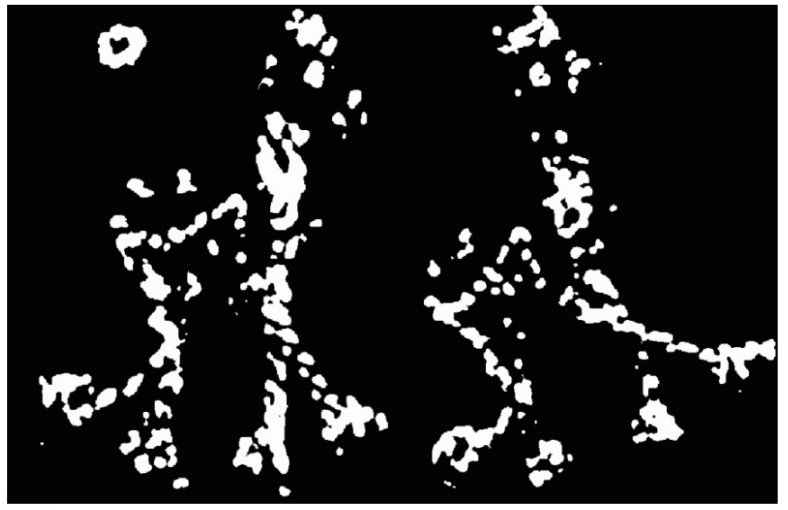
Even though the image, is tilted (or projected), the harris corner detector is able to find the corners in the image.
Note
Using harris corner detector, it might seem that we can find the corresponding points to find the fundamental matrix. However, these points are just the candidates for the best points to consider for correspondence. We have to remove outliers from these corners, along with other important challenges that arise from Harris Corner detector.
Another important point is that, while Harris corner detector gives you all the corners in the image, it does not give you the correspondence between the corners.