
Feature Matching
Contents
Feature Matching#
Keep in mind that the problem at hand is the 2D \(\rightarrow\) 3D reconstruction problem.
The previous pages discuss about using an image patch to find the best candidates for the 8 corresponding points between left and right images to find the Fundamental Matrix.
We use the Harris matrix \(H\) to find the potential best candidates for correspondence between the left and right images. Using eigen values of the matrix \(H\) makes the computation of corner detection much simpler. This leads to the Harris Operator \(f\) that is defined here.
However, the harris operator is not scale invariant. To find the automatic size of the patch that would best find the corner (candidates for correspondence). This is grid search problem.
SIFT features provide a better alternative to the above grid search by converting the rectangular image patch to a circle and using gradient values at each pixel. These gradients are represented in the form of histograms by rotating the circle the gradient values are matched between the patches.
This leads us to the feature matching problem. Finding what candidate in the left image maps to what candidate in the right image.
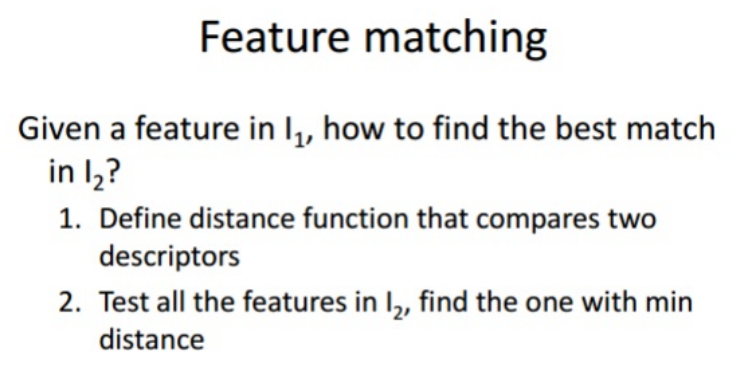
Fig. 49 Feature Matching#
Note
Even though the features can be independent (or a good candidate) there could be more than one match for a feature in the left image to feature in the right image.
To overcome this problem, we pick two matches for a given feature in the left image and maintain a score function to find the relative difference between the matched features. Refer to the feature matching example for the window fencing from slides.
Note
Harris corner detector tells if a feature is good candidate for correspondence matching or not, it does not say if the feature is unique or no.
Performance of feature matching is measured in terms of true positives/false positives true negatives/false negatives.
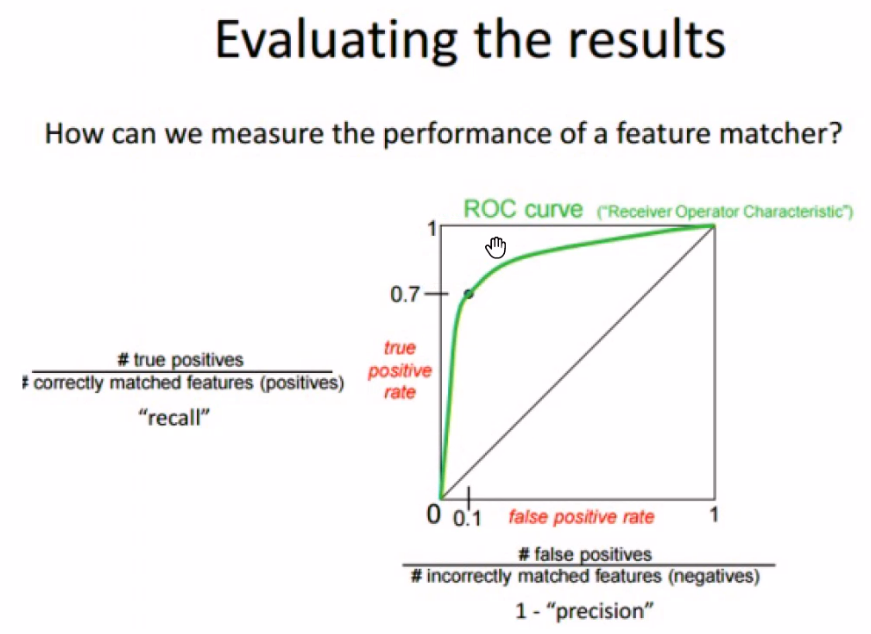
Fig. 50 Performance of Feature Matching#
Properties of SIFT features#
Can handle changes in viewpoint
Upto about 60 degree out of plane rotation
Can handle significant changes in illumination
Fast and efficient - can run in real time
Lots of code available.
RANSAC#
This is a randomized algorithm. We randomly pick a random sample of points and define a loss function. We choose points that minimize this loss function.
This is very close to the Model fitting problem in Machine Learning. For example, least squares. Refer Linear Regression for more information.
For Linear Regression, we need precisely two training points to find the slope \(a\) and intercept \(b\).
Here, in the case of Fundamental matrix, we have \( x_r' F x_l \). We need 8 corresponding points. In this case the fundamental matrix is a parametric model. To achieve the best curve that best captures the geometry of points, we define a loss function and minimize the loss function.
In case of Linear Regression, this loss function is the Sum of Squared Residuals.
Ransac automatically takes care of the noise in the training samples.
In general,
where,
p = probability of selecting inliers
w = ratio of inliers to total # of points
n = minimum # of points required (for line=2, circle = 3)
k = # of iterations